
自動化装置
人手の作業をロボットやカメラに置き換えることで省人化や生産性の向上が可能です。
EDM-LinkageTM
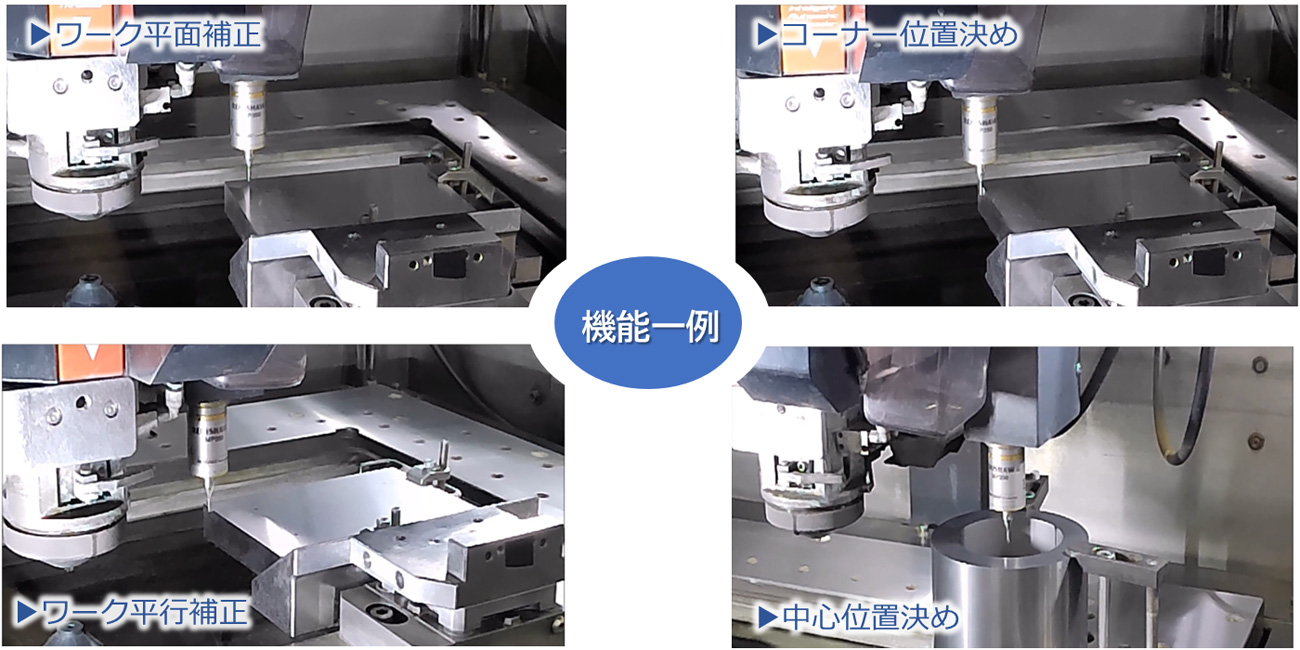
高精度加工前段取り改善の自動化ソリューション
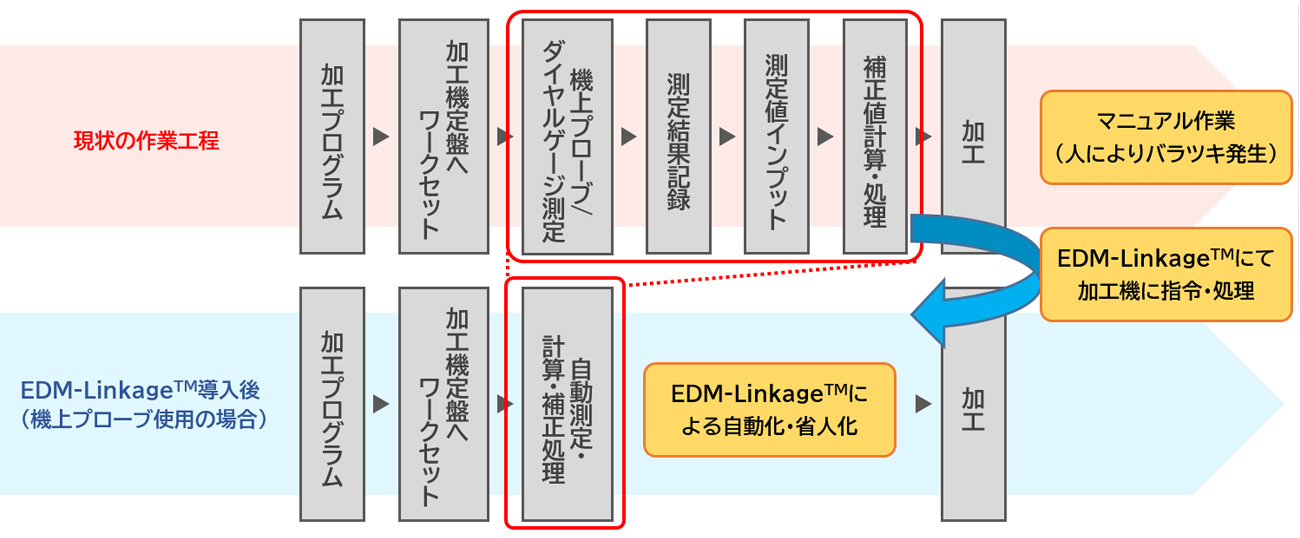
三菱電機ワイヤ放電加工機において、ワーク計測・補正量計算 → 補正の事前段取り ~ 加工までを自動化※することが可能なソフトウェアです。
※三菱電機ワイヤ放電加工機、機上プローブオブション、CamMagic等のCAMソフトウェアをお客様側で準備いただくことが必要となります。本ソフト適用可否は詳細確認後のご回答となります。
確認精度は、加工機の軸移動、スタイラス、環境によって変わります。
本ソフトによる測定結果は加工ワーク精度を保証するものではありません。
EDM-LinkageTMの特長:
CAMソフトウェアPCにインストールするだけで使用可能
面倒な設定や特殊なプログラム作成が不要でシンプルな操作が可能
複数台の三菱電機放電加工機をお使いの場合でも、PC1台で数台の事前段取りが可能 (ネットワーク接続されている場合)
EDM-LinkageTMの導入効果:
 EDM-Linkage
EDM-Linkage仕分け装置
ロボットとビジョンカメラを使用した仕分け装置
ビジョンカメラを使用してコンベア上のワーク判定と角度補正を行い、判定結果に応じた仕分けをロボットで行います。
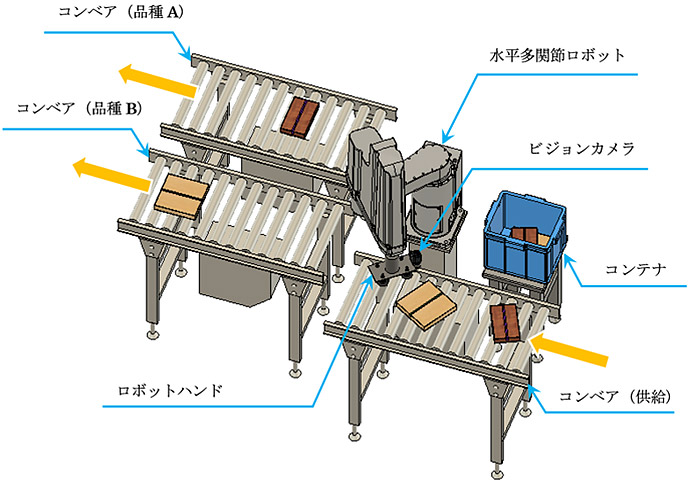
| 使用部材 | 役割 |
| 水平多関節ロボット | ワークの移載 |
| ロボットハンド | ワークの吸着 |
| ビジョンカメラ | ワークの形状、ワークの傾き確認 |
| コンベア | ワークの搬送 |
| コンテナ | NGワークの格納 |
搬送装置
ロボットと走行軸を使用した搬送装置
ロボットと走行軸を用いることで自動化ラインを形成します。
ロボットを走行軸上に配置することで、最適なワーク投入が可能です。
垂直多関節ロボットを使用することで、複雑な置き位置に対してもワーク供給や回収が可能です。
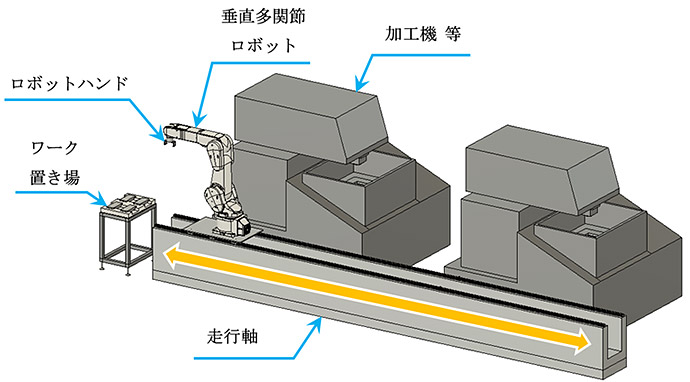
| 使用部材 | 役割 |
| 垂直多関節ロボット | ワークの供給、回収 |
| ロボットハンド | ワークの把持 |
| 加工機等 | ワークの加工(工作機械や検査機も相談可) |
| 走行軸 | ワークの搬送 |
| ワーク置き場 | ワークの供給 |
組立装置
ロボットとトルクドライバを使用した組付装置
ロボットのハンドにトルクドライバを持たせることで、正確かつ効率的にねじ締めを行います。
ビジョンカメラを用いることでねじ締め漏れを防止します。
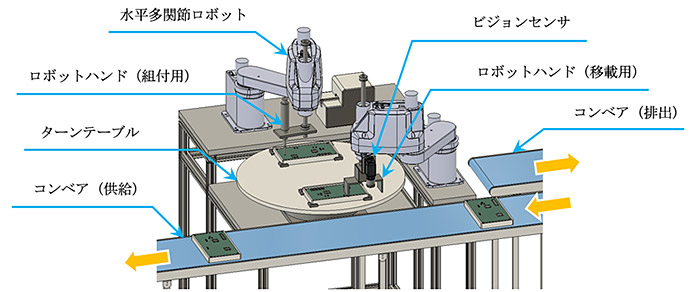
| 使用部材 | 役割 |
| 水平多関節ロボット | ワークの組付、移載 |
| ロボットハンド(組付用) | ねじ締め(トルクドライバ) |
| ロボットハンド(移載用) | ワークの把持 |
| ビジョンカメラ | ねじ締め確認 |
| コンベア、ターンテーブル | ワークの搬送 |